Diving Into Badwater
Summary
Using an improved elevation model of Mars (MOLA+HRSC), this study shows that the planet’s lowest point lies at -8528m, which is 328m deeper than the value most commonly reported in widely available sources.Download a paper based on this work from EarthArXiv (DOI: 10.31223/X5HN10).
Results
For over twenty years, an elevation of about -8200m (relative to the Martian reference datum, a sphere of radius 3396.19 km) has been cited in the literature as the lowest point on Mars, usually differing by only a few metres. Examples include:
“The lowest point on the Martian surface is located in Badwater crater (33°S, 62°E) at an elevation of -8194m” (Voelker et al., 2017) [1].
“The black asterisk marks the deepest location on Mars (-8204m) on the floor of Badwater crater” (Bernhardt et al., 2016) [2].
“The lowest elevation on the planet (-8200m) occurs within the 33-km-diameter Badwater crater in the northwest corner of the quadrangle in Hellas Planitia” (Tanaka et al., 2019) [3].
“-8200m Minimum” on the labeled elevation scale of a topographic map of Mars (USGS, 2002) [4].
This range of values is based on measurements taken by the Mars Orbiter Laser Altimeter (MOLA). The point to which they refer is shown in blue in Fig 1, using a Mars Quickmap layer based on a MOLA Digital Elevation Model (DEM). It lies offset from the centre of Badwater crater, within the Hellas basin. The lowest point identified using a MOLA+HRSC (High Resolution Stereo Camera) DEM is marked in red.
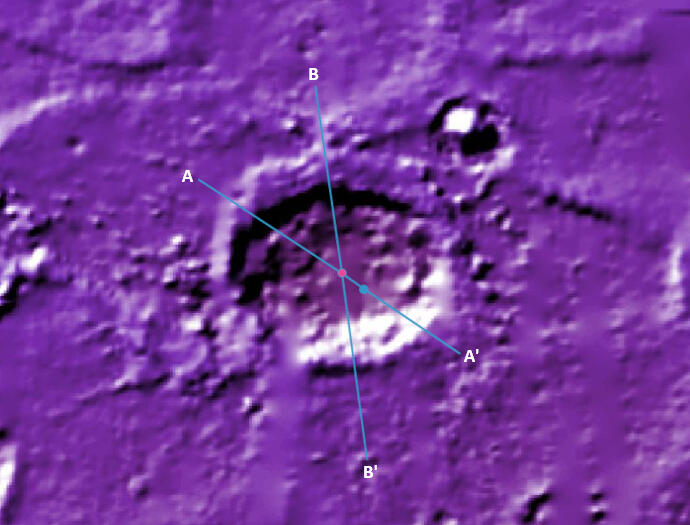
Fig 1 Badwater crater, displayed with Mars Quickmap’s ‘MOLA Color Shaded Relief’ layer
Table 1 provides the details of the points in Fig 1 per each DEM:
| Digital Elevation Model | Coordinates of lowest point (lat, lon) | Elevation of lowest point |
|---|---|---|
| MOLA (463m per pixel) | [-32.84749, 62.20833] | -8201m |
| MOLA+HRSC (200m per pixel) | [-32.79945, 62.14029] | -8527.995m |
Fig 2 presents terrain elevation profiles along the A-A' transect in Fig 1, passing through both points. The profile derived from the MOLA+HRSC DEM reveals the lowest point on Mars to be within a central pit on the floor of Badwater crater - a feature that appears as an undifferentiated section in the MOLA-only profile.
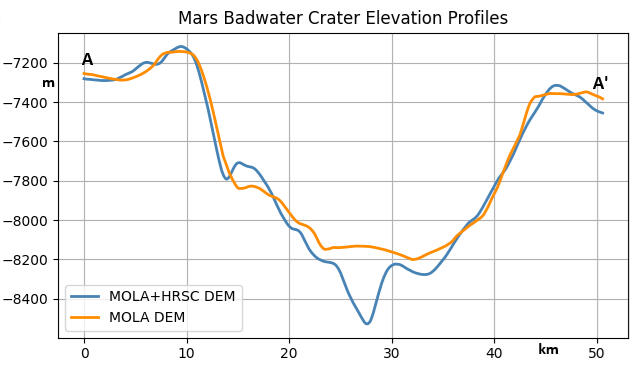
Fig 2
The terrain elevation profiles in Fig 3 along the B–B′ transect of Fig 1, further illustrate that the MOLA DEM represents the terrain across the pit region as flat and featureless.
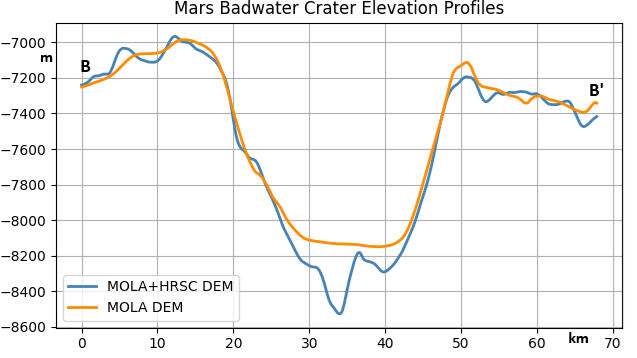
Fig 3
Figure 4 shows 3D renderings of the Badwater crater floor generated from each of the DEMs listed in Table 1, based on 256×256 pixel GeoTIFFs exported from Mars Quickmap. Vertical relief has been exaggerated to enhance topographic variation. Note the smooth regions lacking detail in the MOLA-based image compared with the MOLA+HRSC one. In the latter, the pit featured in the elevation profile of Figs 2 and 3 is clearly visible, and its form and position within the surrounding terrain apparent.
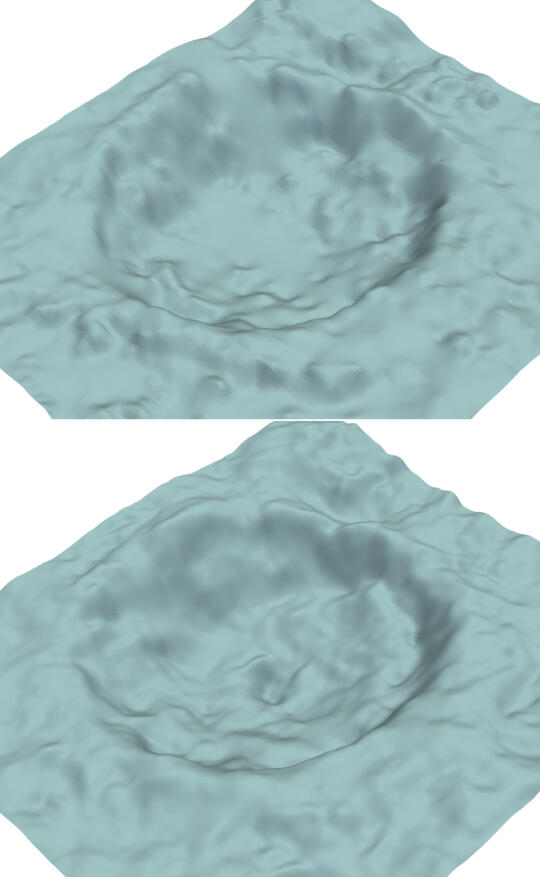
Fig 4 Badwater crater 3D Renders. Top: With MOLA DEM Bottom: With MOLA+HRSC DEM
As visual reference for the crater's actual appearance, Figure 5 shows an image of Badwater taken by the Context Camera (CTX) on the Mars Reconnaissance Orbiter (MRO). The image is part of a global mosaic created by the Bruce Murray Lab for Planetary Visualization, rendered at 5 metres per pixel (so each pixel is about the size of a parking space). The mosaic is available as a layer in Mars Quickmap. The central depression structure seen in this image is consistent with its representation in the MOLA+HRSC DEM-based plots: the elevation profiles (Fig 2 and 3) and 3D model (Fig 4).
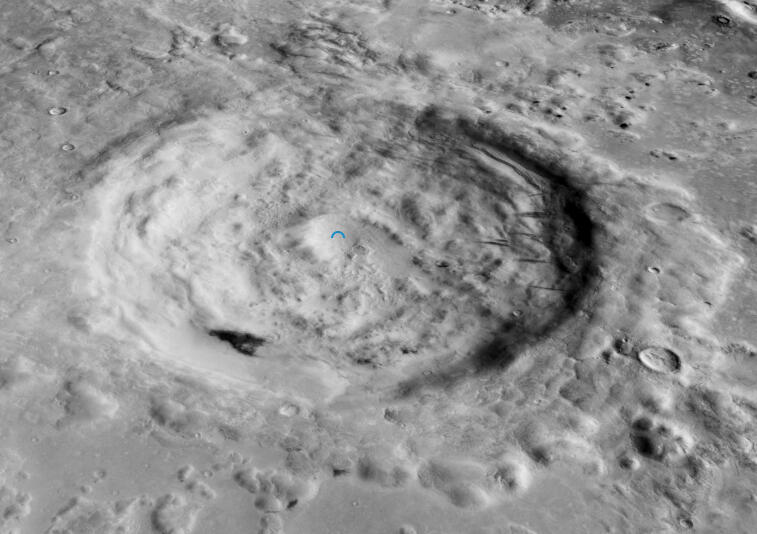
Fig 5 Badwater crater – CTX Mosaic image
Most complex impact craters on rocky planets feature central peaks, but Mars is an exception: a number of craters in its low to mid latitudes have central pits instead. Similar pits appear in craters on icy moons like Ganymede and Callisto, suggesting that subsurface water may influence their formation. For comparison, Fig. 6 shows another Martian crater at [-13.08139, 17.93094] with a diameter similar to Badwater’s. In both craters, the central pits are similar in size and depth, and are encircled by raised, asymmetric rims.
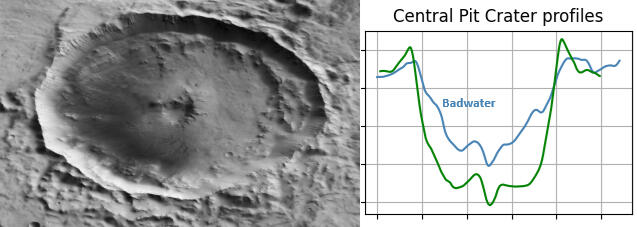
Fig 6 A central pit crater, and its elevation profile
Mind The Gap
Determining the lowest point on Mars requires high-coverage, high-resolution, vertically accurate topographic data, due to the sensitivity of such analyses to small-scale surface variations. The Mars Global Surveyor’s MOLA remains the only dedicated altimeter to have orbited Mars. The data it collected between 1999 and 2001 provides a near-global elevation dataset with vertical precision close to 1m, collected along narrow ground tracks spaced 300-400m apart along-track, and up to several kilometres apart across-track at low latitudes. As a result of the spacecraft's orbital path not covering every region (and other factors such as the laser not firing continuously, or data loss due to instrument limitations or transmission errors), certain areas exhibit gaps in data coverage. In these regions, the MOLA DEM interpolates across gaps, resulting in flat or smoothed strips that lack true topographic detail. This is illustrated by Som et al. in the 2008 paper "The Mars Orbiter Laser Altimeter dataset: Limitations and improvements." In Fig 7, the left panel shows strips of 'MOLA gaps' across Warrego Valles, and the right panel displays the orbital tracks, with the gaps marked by arrows.
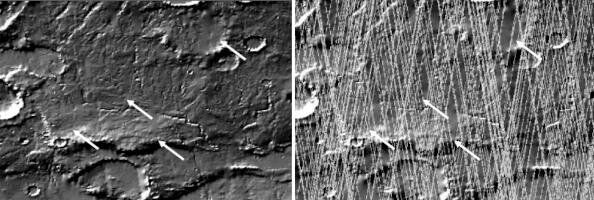
Fig 7 Coverage gaps 'MOLA Color Shaded Relief' of Warrego Valles [-42.6, -93.2]
Features that fall into these gaps are lost, and this is the case with the floor structures of Badwater crater.To address these limitations, stereoscopic imaging is used to produce higher-resolution DEMs. The High Resolution Stereo Camera (HRSC) on Mars Express is the only dedicated stereo imaging system currently in orbit around Mars. It reconstructs topography at resolutions down to tens of metres by capturing overlapping images from multiple viewing angles. While HRSC DEMs can provide absolute elevations, their vertical accuracy depends on viewing geometry, lighting conditions, and surface texture, all of which affect the quality of image matching.Blending HRSC data with MOLA improves vertical accuracy by anchoring HRSC’s higher-resolution detail to MOLA’s geodetic reference frame. This produces DEMs that preserve local surface features while minimizing large-scale elevation bias. The global 200m MOLA+HRSC blended DEM released by the USGS in 2018 is one such example. By combining the spatial resolution needed to detect features like small pits with reliable absolute elevations, this hybrid approach offers clear advantages over using either dataset alone.Blended DEMs can also be constructed from even higher-resolution imagery. In this sense, HRSC DEMs act as a kind of resolution bridge between the coarse MOLA dataset and finer DEMs that can be generated from images captured by cameras aboard the MRO - the CTX (6m per pixel) and High Resolution Imaging Science Experiment (HiRISE, 25-50 cm per pixel).
Conclusion
This study has shown that the widely cited value for Mars’ lowest elevation is derived from a MOLA-only DEM dating to 2001, which lacks raw data in the region where the true lowest point lies. As a result, the terrain was interpolated, missing a 6 km-wide pit. By using a more recent blended MOLA+HRSC DEM, which incorporates image-based topography, this study has produced a more accurate estimate of the location and elevation of Mars’ lowest point, capturing the depth of this previously unaccounted-for feature.
Author
This study was carried out by Jim Singh and completed on 8 June 2025. It stems from an ongoing collaboration with Daniel Quinn and Oscar Argudo to systematically catalogue all lunar and Martian mountains and craters with topographic prominence (or anti-prominence) of at least 1000m. The effort builds on a 2024 publication documenting 7149 such features on Earth. Progress updates are available at WorldRibus.org.
Acknowledgments
Thanks to Dr. Robert R. Herrick (University of Alaska Fairbanks) for reviewing this work.
References
[1] Voelker, M., Hauber, E., Schulzeck, F., & Jaumann, R. (2017). Grid-mapping Hellas Planitia, Mars - Insights into distribution, evolution and geomorphology of (peri)-glacial, fluvial and lacustrine landforms in Mars’ deepest basin. Planetary and Space Science, 145, 49-70. https://doi.org/10.1016/j.pss.2017.07.012[2] Bernhardt, H., Reiss, D., Hiesinger, H., & Ivanov, M. A. (2016). The honeycomb terrain on the Hellas basin floor, Mars: A case for salt or ice diapirism. Journal of Geophysical Research: Planets. https://doi.org/10.1002/2016JE005007[3] Tanaka, K. L., Coles, K. S., & Christensen, P. (2019). The Atlas of Mars: Mapping its geography and geology (pp. 222-227) [Book]. Cambridge University Press. https://doi.org/10.1017/9781139567428.033[4] U.S. Geological Survey Water Resources Division. (2002). Topographic map of Mars, M 25M RKN (Open-File Report 2002-282) [Map]. U.S. Geological Survey. https://doi.org/10.3133/ofr02282
Created by: Jim Singh - Electrical Engineer, Amateur Astronomer, Science Writer. Last Updated: September 2025. If you've found this site useful or have feedback, please drop me a line at jimmyboysingh. Follow that name with an at, then gmail and finish up with a dot and a com.